|
|
|
|
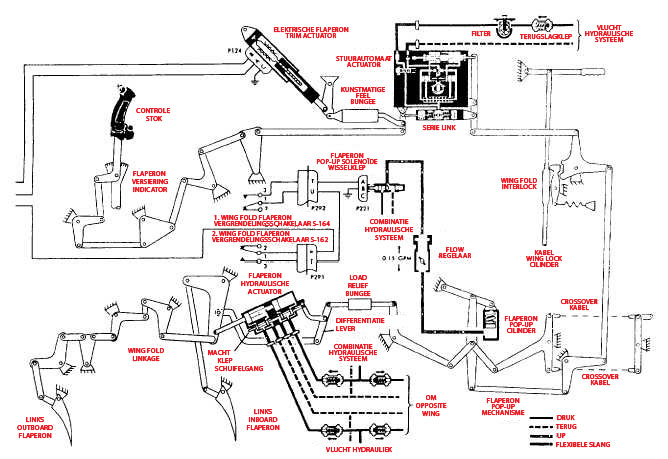
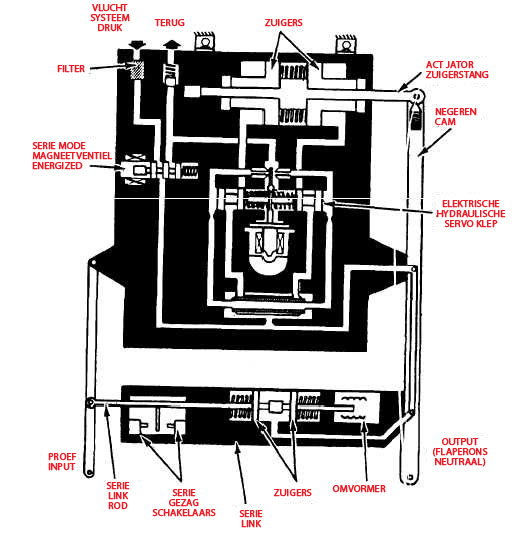
ACTUATOR VAN DE AUTOMATISCHE PILOOT. Actuator van de flaperonautomatische piloot (fign. 9-12 en 9-13) bevat een elektrohydraulische servoklep, actuator zuigers, solenoïdeklep, omvormer, reekslink, en reeks-verbinding staaf. Het controleert flaperon onrechtstreeks beweging in antwoord op mechanische bewegingen van de loods. Het ontvangt elektroinput van het automatische vluchtleidingssysteem. Actuator kan in modesmanual twee of reeksen werken. Op handwijze, de-energized de solenoïdeklep en geen vloeistof is ported aan om het even welk deel van actuator. De actuator zuigerstang is vrij niets uit te voeren. Doet de reeks-verbinding cilinder dienst als stijve link die de hefboommotie van de overdrachteninput aan de outputhefboom. Op reekswijze, activeert de solenoïdeklep en havensdruk aan de servoklep. De druk van de servoklep drijft samen de actuator zuigers. Deze druk veroorzaakt de zuigers en de staaf om als één stuk dienst te doen. Wanneer de servoklep bij ongeldig is, is de druk in de kamers van het zuigereind gelijk. Elektro signalen
van de automatische oorzaak van het vluchtleidingssysteem de elektrohydraulische servoklep om te verschillen de druk in de eindkamers. Het signaal verstrekt de het werk kracht voor actuator. De actuator zuigerstang drijft de outputhefboom. De druk bij de reekslink perst de slotlente samen, openend de reekslink. Actuator kan de proef-gebevolen zuiger strijken. Wanneer veroorzaakt de proefbewegingen het inputverband, relatieve motie tussen input en output de omvormer om een signaal naar de versterker te verzenden AFCS. Het signaal combineert met andere signalen van de vluchtstabiliteit, en het resulterende signaal stelt de servoklep in werking. AFCS kan door proef worden met voeten getreden toepassend een stokkracht van 25 ponden. ACTUATORS van het SYSTEEM Actuators van het flaperonsysteem controleren direct de flalperonbeweging in antwoord op mechanische beweging van automatische pilootactuator. Actuator (fig. 9-1 2) bestaat uit twee achter elkaar-opgezette machtszuigers en een pendel van de machtsklep. De mechanische input wordt geïntroduceerd door lading-hulp (veiligheid) bungee en de hefboom van de klepinput aan het de pendelgedeelte van de machtsklep van actuator. De input veroorzaakt een klepfout en porting van hydraulische druk aan de machtszuigers. Aangezien flaperon zich beweegt, neigt de mechanische aaneenschakeling in bijlage aan actuator om deze klepfout, de de pendelwinst van de machtsklep aan neutraal nietig te verklaren. Flaperons blijven in de geselecteerde positie tot de nieuwe mechanische input van proef of AFCS wordt ontvangen.
| |
De Verklaring van de privacy - de Informatie van Copyright. - Contacteer ons